Skip to content
Menu
Latest
Jew-ish
Israel at War
Podcasts
Videos
+More
Latest
Jew-ish
Israel at War
Podcasts
Videos
+More
Subscribe
From the Grapevine is closed.
Welcome to Unpacked, home to great Jewish articles, videos, podcasts and recipes.
Get the best of Jewish and Israel into your inbox with the #1 newsletter
Email
Submit
Editor’s Top Picks
Is Drake Jewish?!
Our favorite over the top Yiddish curses
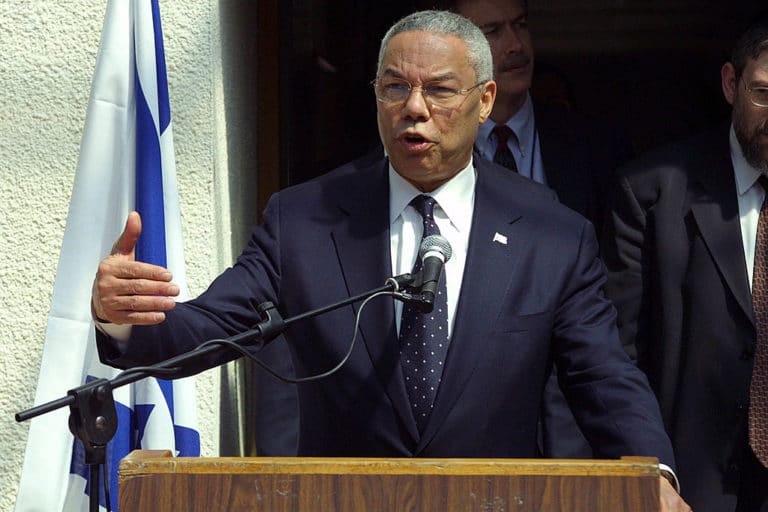
Colin Powell: The general who spoke Yiddish
Oslo: The Peace That Wasn’t
One thing Israel does that no other country does
Space Jew: Is William Shatner Jewish?
Is Doja Cat Jewish?!
Everything we know about Jeopardy host Mayim Bialik’s Jewish identity
Our Latest Videos
5 Jewish women who changed the world
What do these pro-Palestine chants really mean?
Does the Palestinian Authority support terrorism?
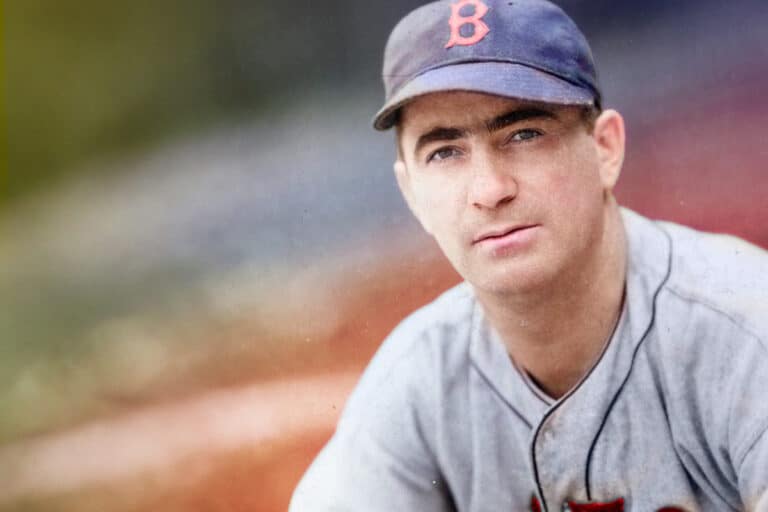
How did Jewish pro baseball player Moe Berg become a CIA spy?
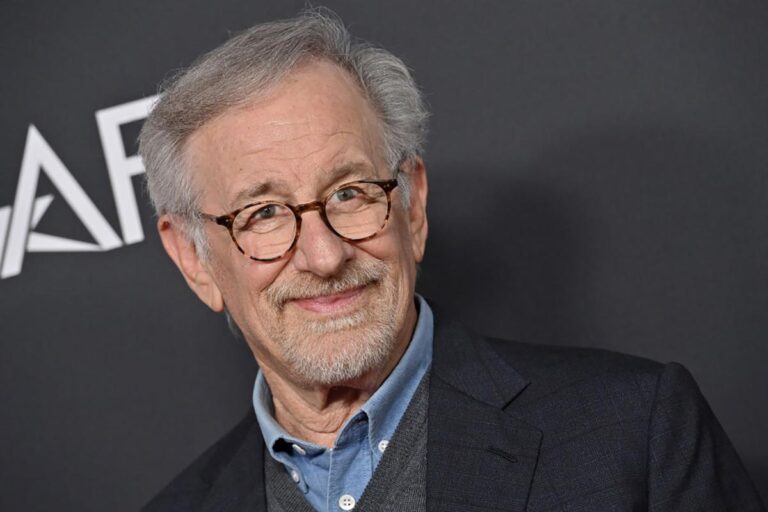
Are all of Steven Spielberg’s films Jewish?
Did Jews run the Italian mafia?
7 surprising Jewish wedding customs
Who was the last Jew in Afghanistan?
Search
Search